Содержание #
- Введение
- Электрическая принципиальная схема
- Монтажная схема
- Сборка проекта
- Запуск проекта
- Программная реализация
- Практическая значимость проекта
- Расширение проекта
- Видеообзор проекта
Введение #
Представляю вам образовательный проект — “Автоматизированная система полива” разработанный в рамках учебно-методического комплекса на базе одноплатного компьютера Repka PI 4.
Этот проект представляет собой автоматическую систему полива для растений, которая управляет поливом на основе показателей влажности почвы, времени или заданного интервала. Система использует различные датчики и устройства для контроля за состоянием почвы и управления насосом.
Проект будет собираться с использованием “Учебно-методический комплекс REPKA”. Схему сборки можно найти в разделе "Примеры готовых проектов" учебного пособия УМК “REPKA”.
Также все необходимые материалы и схемы подключения доступны в репозитории на платформе Gitflic.
Компоненты проекта
- Потребуется аналогово-цифровой преобразователь (далее АЦП) модели ADS1115, см. рисунок 1.
.") 2. Датчик влажности почвы (FC-28) для мониторинга уровня влаги в почве, см. рисунок 2.
2. Датчик влажности почвы (FC-28) для мониторинга уровня влаги в почве, см. рисунок 2.
.") 3. Часы (DS3231) требуются для реализации функционала полив по времени или каждые N секунд, см. рисунок 3.
3. Часы (DS3231) требуются для реализации функционала полив по времени или каждые N секунд, см. рисунок 3.
.") 4. Дисплей 1602 I2C для отображения показаний с датчика влажности почвы и времени.
4. Дисплей 1602 I2C для отображения показаний с датчика влажности почвы и времени.

5. Помпа 5 вольт для полива растения.
 6. Реле модуль 3v для запуска помпы.
6. Реле модуль 3v для запуска помпы.

Вы можете приобрести все необходимые компоненты отдельно от "Учебно-методический комплекс REPKA". Ссылки на модули приведены в таблице ниже.
| Компонент | Ссылка на приобретение |
|---|---|
| Монтажная/макетная плата | Ссылка |
| Шлейф | Ссылка |
| Переходник с шлейфа на макетную плату | Ссылка |
| Соединительные провода | |
| АЦП (ADS1115) | Ссылка |
| Часы (DS3231) | Ссылка |
| Дисплей 1602 I2C | Ссылка |
| Помпа 5 вольт | Ссылка |
| Реле модуль 3v | Ссылка |
| Датчик влажности почвы (FC-28) | Ссылка |
Перед началом сборки следует выполнить подключение монтажной платы.
Во время сборки проекта будем регулярно обращаться к электрической принципиальной схеме и монтажной схеме, представленными в учебном пособии (см. рисунки 7 и 8). Эти схемы будут служить основным ориентиром на всех этапах подключения компонентов, обеспечивая точность и правильность сборки устройства.
Для разработки кода будет использоваться текстовый редактор Geany, котороый входит в состав стандартного ПО Репка ОС.
Электрическая принципиальная схема

Монтажная схема

Сборка проекта
1. Подключение АЦП (ADS1115).
Как видно из рисунков 7 и 8 АЦП подключается через интерфейс I2C и питается от 5V.
1.1. Подключим АЦП (ADS1115) к макетной плате согласно таблице 1:
| Макетная плата | АЦП (ADS1115) |
|---|---|
| 5V | V |
| GND | G |
| SCL1 | SCL |
| SDA1 | SDA |
Таблица 1. Подключение АЦП (ADS1115) к макетной плате.
1.2. Результат подключения будет выглядеть следующим образом, см. рисунок 9:
 к макетной плате.")
Проверку работоспособности АЦП будем проводить после подключения датчика влажности почвы, чтобы убедиться в правильности считывания аналогового сигнала и корректности преобразования данных о влажности в цифровую форму.
2. Подключение датчик влажности почвы (FC-28).
Как видно из рисунков 7 и 8, плата датчика FC-28 подключается к АЦП через пин A0 и получает питание от 5V.
2.1. Подключим плату FC-28 к макетной плате согласно таблице 2:
| Макетная плата | FC-28 | АЦП (ADS1115) |
|---|---|---|
| 5V | VCC | |
| GND | GND | |
| A0 | A0 |
Таблица 2. Подключение платы датчика влажности почвы (FC-28) к макетной плате.
2.2. Результат подключения будет выглядеть следующим образом, см. рисунок 10:

2.3. После чего подключаем сам датчик к плате согласно схемам выше, результат на рисунке 11. Тут все просто плюс к плюсу, минус к минусу.

3. Выполним проверку подключения устройств АЦП и датчика влажности. Для этого будем использовать python скрипт из репозитория repka-pi_iot-examples.
3.1. Клонируем репозиторий:
git clone git@gitflic.ru:repka_pi/repka-pi_iot-examples.git
3.2. Переходим в репозиторий:
cd repka-pi_iot-examples/
3.3. Выполним установку зависимостей.
3.3.1. Если хотите установить зависимости только для датчика влажности, выполните:
make setup-fc-28
3.3.2. Если хотите установить зависимости для всех датчиков и проектов, выполните:
make setup-all
3.4. Запускаем скрипт для проверки работоспособности прибора:
make fc-28
3.5. Если на этапе 3.4 возникает ошибка, необходимо внести изменения в Python-скрипт, расположенный по пути devices/sensors/FC-28_example/py, корректируя номер – i2c = I2C("/dev/i2c-1") и адрес шины – ADS1115_ADDR. В случае отсутствия ошибок, данный шаг можно пропустить.
Адрес ADS1115 на шине I2C
ADS1115_ADDR = 0x48
# Подключение к I2C
i2c = I2C("/dev/i2c-1")
3.6. Из рисунка 12 видим, что скрипт успешно выполнился, и данные о влажности выводятся в консоль.
 4. Подключение часов (DS3231).
4. Подключение часов (DS3231).
Как видно из рисунков 7 и 8 часы подключаются через интерфейс I2C и питаются от 5V.
4.1. Подключим DS3231 к макетной плате согласно таблице 3:
| Макетная плата | DS3231 |
|---|---|
| 5V | VCC |
| GND | GND |
| SDA1 | SDA |
| SCL1 | SCL |
Таблица 3. Подключение DS3231 к макетной плате.
При использовании модуля часов форм-фактора, как у меня, подключение может быть затруднено из-за отсутствия полноценных подписей на разъёмах. Для удобства прилагаю изображение, которое поможет вам правильно осуществить подключение.
 5. Аналогично пункту 4 выполним проверку подключения датчика.
5. Аналогично пункту 4 выполним проверку подключения датчика.
5.1. Установите зависимости для часов, если ранее не устанавливали все зависимости.
make setup-ds3231
5.2. После выполним python скрипт, расположенный по пути: /devices/input-output/ds3231_example, используя команду:
make ds3231
5.3. После успешного выполнения скрипта в консоли должна появится информация о времени, см. рисунок 14.
 6. Подключение реле модуля 3V.
6. Подключение реле модуля 3V.
Как видно из рисунков 7 и 8, реле подключается к 5V и управляется через GPIO.
6.1. Подключим реле модуль 3V к макетной плате согласно таблице 4.
| Макетная плата | Реле |
|---|---|
| 3V | VCC |
| GND | GND |
| GPIO17 | IN |
| GND | NO |
Таблица 4. Подключение реле модуля 3V к макетной плате.
6.2. Результат подключения будет выглядеть следующим образом, см. рисунок 15:
 Проверку работоспособности реле осуществим после подключения помпы, так как именно реле подает на нее напряжение.
Проверку работоспособности реле осуществим после подключения помпы, так как именно реле подает на нее напряжение.
7. Подключение помпы 5V.
Как видно из рисунков 7 и 8, помпа подключается плюсом к 5V макетной платы, а минусом к реле.
7.1. Подключаем помпу к макетной плате согласно таблице 5.
| Макетная плата | Помпа | Реле |
|---|---|---|
| 5V | VCC | |
| GND | GND |
Таблица 5. Подключение помпы к макетной плате.
7.2. Результат подключения будет выглядеть следующим образом, см. рисунок 16:
 8. Выполним проверку подключения аналогично пункту 3.
8. Выполним проверку подключения аналогично пункту 3.
8.1. Установите зависимости для помпы, если ранее не устанавливали все зависимости.
make setup-pump
8.2. После выполним python скрипт, расположенный по пути: /devices/executive/pump_example/py, используя команду:
make pump
8.3. После успешного выполнения скрипта помпа должна издавать звук, характерный для её работы.
9. Подключение ЖК дисплея (1602 I2C).
Как видно из рисунков 7 и 8, дисплей подключается по интерфейсу I2c и питается от 5V.
9.1. Выполним подключение к макетной плате согласно таблице 6.
Макетная плата | 1602 I2C |
5V | VCC |
GND | GND |
SCL1 | SCL |
SDA1 | SDA |
Таблица 6. Подключение ЖК дисплея (1602 I2C) к макетной плате.
9.2. Результат подключения будет выглядеть следующим образом, см. рисунок 17:
 к макетной плате.") 10. Выполним проверку подключения аналогично пункту 3.
10. Выполним проверку подключения аналогично пункту 3.
10.1. Установим зависимости для ЖК дисплея (1602 I2C), выполнив:
make setup-display-1602-i2c
10.2. Выполните команду:
make display-1602-i2c
10.3. Как видно из рисунка 18 дисплей успешно подключен:
.")
Вы можете собрать более бюджетную версию данного проекта.
 Для более бюджетной реализации проекта можно обойтись без активного охлаждения, используя Repka Pi 4 в стандартной комплектации, а также макетную плату без внешнего источника питания — при этом остальные компоненты остаются неизменными. Макетную плату можно приобрести здесь.
Для более бюджетной реализации проекта можно обойтись без активного охлаждения, используя Repka Pi 4 в стандартной комплектации, а также макетную плату без внешнего источника питания — при этом остальные компоненты остаются неизменными. Макетную плату можно приобрести здесь.
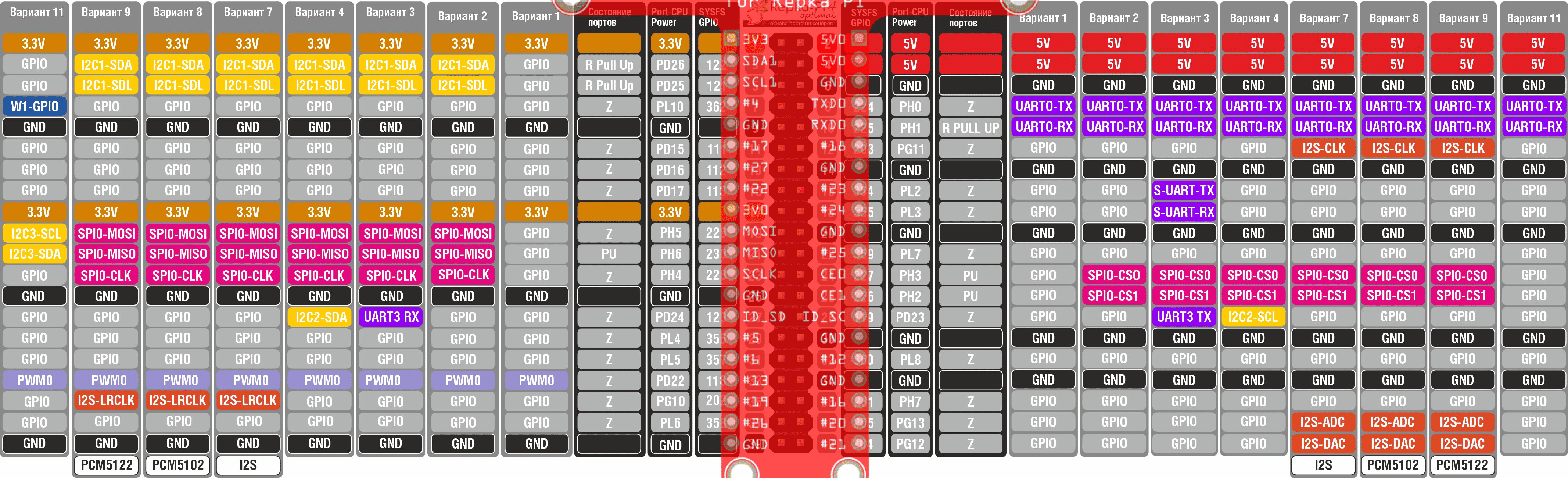
Для подключения нам потребуется “Распиновка портов на 40 pin разъёме на Repka Pi 4“, см. рисунок ниже: Поскольку расширительная плата GPIO полностью повторяет конфигурацию распиновки, можно применить те же таблицы и схемы, которые использовались ранее для устройств.
Поскольку расширительная плата GPIO полностью повторяет конфигурацию распиновки, можно применить те же таблицы и схемы, которые использовались ранее для устройств.
11. Подключим АЦП (ADS1115) к макетной плате согласно таблице 1:
 к макетной плате.") Проверку работоспособности АЦП будем проводить после подключения датчика влажности почвы, чтобы убедиться в правильности считывания аналогового сигнала и корректности преобразования данных о влажности в цифровую форму.
Проверку работоспособности АЦП будем проводить после подключения датчика влажности почвы, чтобы убедиться в правильности считывания аналогового сигнала и корректности преобразования данных о влажности в цифровую форму.
12. Подключим FC-28 к макетной плате согласно таблице 2:
 Проверка модуля осуществляется аналогично пункту 3.
Проверка модуля осуществляется аналогично пункту 3.
13. Подключим DS3231 к макетной плате согласно таблице 3:
 Проверка модуля осуществляется аналогично пункту 5.
Проверка модуля осуществляется аналогично пункту 5.
14. Подключим реле модуль 3V к макетной плате согласно таблице 4:
 Проверку работоспособности реле осуществим после подключения помпы, так как именно реле подает на нее напряжение.
Проверку работоспособности реле осуществим после подключения помпы, так как именно реле подает на нее напряжение.
15. Подключаем помпу к макетной плате и реле согласно таблице 5.
Внимание! Для подключения помпы используйте дополнительный источник питания, такой как лабораторный, аккумуляторный или батарейный блок, а не подключение через Repka Pi 4.
В противном случае одноплатный компьютер может отключиться.
А. Подключение с использованием лабораторного блока питания: Б. Подключение с использованием аккумуляторного блока питания:
Б. Подключение с использованием аккумуляторного блока питания:

Проверка модуля осуществляется аналогично пункту 8.
16. Выполним подключение дисплея к макетной плате согласно таблице 6:
 к макетной плате.") Проверка модуля осуществляется аналогично пункту 10.
Проверка модуля осуществляется аналогично пункту 10.
Программная реализация #
Программное обеспечение — это мозг нашей автоматизированной системы полива. Оно отвечает за считывание данных с датчиков, принятие решений и управление исполнительными устройствами, такими как помпа. В этом разделе мы детально рассмотрим логику работы программы, а также различные подходы к её технической реализации на Python и C.
Алгоритм работы #
Чтобы понять логику работы программы, прежде всего, необходимо изучить её алгоритм. Он представлен на блок-схеме и описывает последовательность действий, которые выполняет система от старта до завершения цикла работы.
 Описание алгоритма:
Описание алгоритма:
-
Старт программы и выбор режима:
- При запуске программа инициализирует все подключенные компоненты.
- Далее пользователю предлагается выбрать один из трех режимов работы, каждый со своей уникальной логикой.
-
Режим 1: Автополив по влажности
- Система считывает текущее время с модуля RTC (для отображения на дисплее).
- Затем происходит чтение аналогового значения с датчика влажности почвы.
- Это значение сравнивается с заданным порогом (
MOISTURE_THRESHOLD). - Если влажность ниже порога (
Да): Система считает почву сухой, включает насос на 3 секунды, а затем выключает его. - Если влажность выше или равна порогу (
Нет): Полив не требуется, и система пропускает этот шаг. - В конце цикла на дисплей выводятся актуальные данные о времени и влажности, после чего цикл начинается заново.
-
Режим 2: Полив каждые N секунд
- Этот режим работает по простому таймеру.
- Система считывает время с RTC (для отслеживания интервалов).
- Безусловно включается насос на 3 секунды, а затем выключается.
- После этого программа входит в режим ожидания на
Nсекунд, по истечении которых цикл полива повторяется.
-
Режим 3: Полив по времени
- Система непрерывно считывает текущее время с модуля RTC.
- Каждую секунду она сравнивает текущее время с заданным временем полива.
- Если время не совпадает (
Нет): Система ждет 1 секунду и повторяет проверку. - Если время совпадает (
Да): Насос включается на 3 секунды и выключается. Сразу после этого программа делает паузу в 1 минуту, чтобы избежать повторных срабатываний в ту же минуту, если проверка происходит несколько раз в секунду. - После минутной паузы цикл проверки времени возобновляется.
Реализация на Python #
Python является отличным выбором для быстрой разработки и прототипирования проектов в области Интернета вещей благодаря своей простоте, читаемости и большому количеству готовых библиотек для работы с аппаратным обеспечением.
1. Функциональный подход #
Этот подход является наиболее прямолинейным. Программа строится как набор независимых функций, каждая из которых выполняет одну конкретную задачу (прочитать данные с датчика, включить реле, вывести текст на экран). Основная логика программы координирует вызовы этих функций.
Импорты и глобальные константы
В начале скрипта импортируются все необходимые библиотеки и определяются ключевые параметры и константы.
from periphery import I2C, GPIO
from smbus2 import SMBus
from datetime import datetime
import time
import errno
from RPLCD.i2c import CharLCD
# Адреса устройств на шине I2C и константы
ADS1115_ADDR = 0x48 # Адрес АЦП ADS1115 (датчик влажности)
DS3231_ADDR = 0x68 # Адрес RTC модуля DS3231 (часы)
I2C_BUS_NUM = 1 # Номер шины I2C
RELAY_GPIO = 111 # GPIO пин для управления реле
MOISTURE_THRESHOLD = 20 # Порог влажности для включения полива (%)
Объяснение:
peripheryиsmbus2: Библиотеки для низкоуровневой работы с аппаратными интерфейсами I2C и GPIO.RPLCD.i2c: Высокоуровневая библиотека для удобного управления LCD-дисплеями по I2C.datetime,time,errno: Стандартные модули Python для работы со временем и кодами системных ошибок.- Константы: Вынесение адресов, номеров пинов и пороговых значений в начало файла — это хорошая практика. Она позволяет легко изменять конфигурацию системы, не копаясь в основной логике кода.
Чтение данных с датчика влажности
Поскольку датчик влажности аналоговый, для считывания его показаний используется АЦП (Аналогово-цифровой преобразователь) ADS1115, который взаимодействует с Repka Pi по шине I2C.
# Инициализация I2C для работы с АЦП
i2c_adc = I2C("/dev/i2c-1")
def read_soil_moisture():
config = 0xC183 # Конфигурация для ADS1115
attempts = 5
for attempt in range(attempts):
try:
# Отправляем конфигурацию и запрашиваем данные
i2c_adc.transfer(ADS1115_ADDR, [I2C.Message([0x01, (config >> 8) & 0xFF, config & 0xFF])])
time.sleep(0.01)
i2c_adc.transfer(ADS1115_ADDR, [I2C.Message([0x00])])
read_msg = I2C.Message([0x00, 0x00], read=True)
i2c_adc.transfer(ADS1115_ADDR, [read_msg])
# Преобразуем "сырое" значение в проценты
raw = (read_msg.data[0] << 8) | read_msg.data[1]
if raw & 0x8000:
raw -= 1 << 16
moisture = 100 - int((raw + 32768) / 65535 * 100)
return max(0, min(100, moisture))
except IOError as e:
if e.errno in (errno.EAGAIN, errno.EBUSY, errno.EINTR):
print(f"Попытка {attempt+1}/{attempts}: шина занята, повтор...")
time.sleep(0.05)
continue
else:
raise
raise IOError("Не удалось считать данные с ADC после нескольких попыток")
Объяснение: Функция read_soil_moisture инкапсулирует весь процесс общения с АЦП. Она отправляет на устройство конфигурационные байты (выбирая нужный канал и режим измерения), делает короткую паузу для выполнения преобразования, а затем считывает результат. Полученное 16-битное "сырое" значение (raw) затем математически преобразуется в интуитивно понятные проценты влажности (0-100%). Также в коде реализован надежный механизм повторных попыток на случай, если шина I2C временно занята.
Чтение времени с RTC и управление насосом
Для работы режимов полива по времени и по интервалу необходим модуль часов реального времени (RTC) DS3231.
def bcd2dec(bcd):
return (bcd >> 4) * 10 + (bcd & 0x0F)
def read_time(bus):
data = bus.read_i2c_block_data(DS3231_ADDR, 0x00, 7)
return datetime(2000 + bcd2dec(data[6]), bcd2dec(data[5]), ...)
# === Управление реле (насосом) ===
relay = GPIO(RELAY_GPIO, "out")
def water_on():
relay.write(False) # LOW = реле включено
def water_off():
relay.write(True) # HIGH = реле выключено
Объяснение:
- Модуль DS3231 хранит время в двоично-десятичном формате (BCD), поэтому для его использования необходима вспомогательная функция
bcd2decдля конвертации. - Функция
read_timeсчитывает 7 байт данных с RTC и создает из них стандартный объектdatetime, с которым очень удобно работать в Python. - Функции
water_onиwater_offпредоставляют простой интерфейс для управления реле, которое, в свою очередь, замыкает и размыкает цепь питания насоса. Обычно реле активируется подачей низкого уровня сигнала (False).
Отображение статуса и основная логика
Главная функция main() объединяет все компоненты в единую систему.
lcd = CharLCD('PCF8574', 0x27, cols=16, rows=2)
def display_status(time_str, moisture):
lcd.clear()
lcd.write_string(f'Время: {time_str}')
lcd.cursor_pos = (1, 0)
lcd.write_string(f'Влажн.: {moisture}%')
def main():
# ... (меню выбора режима) ...
with SMBus(I2C_BUS_NUM) as bus:
try:
while True:
now = read_time(bus)
moist = read_soil_moisture()
display_status(now.strftime('%H:%M:%S'), moist)
if mode == "1":
if moist >= 0 and moist < MOISTURE_THRESHOLD:
water_on()
time.sleep(3)
water_off()
time.sleep(1)
elif mode == "2":
# ... (логика полива по интервалу) ...
elif mode == "3":
# ... (логика полива по расписанию) ...
except KeyboardInterrupt:
print("Выход...")
finally:
water_off()
relay.close()
i2c_adc.close()
lcd.clear()
lcd.write_string("Система остановлена")
if __name__ == "__main__":
main()
Объяснение: Функция main — это точка входа в программу. Сначала она запрашивает у пользователя желаемый режим работы. Затем запускается бесконечный цикл while True, который реализует логику, описанную в блок-схеме: считывает время и влажность, обновляет дисплей и, в зависимости от выбранного режима, принимает решение о включении насоса. Конструкция try...finally гарантирует, что при любом завершении программы (даже принудительном) насос будет выключен, а все системные ресурсы — корректно освобождены.
2. Объектно-ориентированный подход (ООП) #
Объектно-ориентированное программирование (ООП) позволяет структурировать код, инкапсулируя данные и методы работы с ними в отдельные "объекты" (экземпляры классов). Такой подход делает код более модульным, удобным для поддержки и расширения.
1. Классы-компоненты
В этом подходе каждый физический компонент системы представляется в виде отдельного класса. Это позволяет легко управлять каждым устройством по отдельности, а также переиспользовать эти классы в других проектах.
SoilMoistureSensor:
from periphery import I2C
import time
import errno
class SoilMoistureSensor:
def __init__(self, i2c_path, address):
self.i2c = I2C(i2c_path)
self.address = address
def read(self):
config = 0xC183
attempts = 5
for attempt in range(attempts):
try:
self.i2c.transfer(self.address, [I2C.Message([0x01, (config >> 8) & 0xFF, config & 0xFF])])
time.sleep(0.01)
self.i2c.transfer(self.address, [I2C.Message([0x00])])
read_msg = I2C.Message([0x00, 0x00], read=True)
self.i2c.transfer(self.address, [read_msg])
raw = (read_msg.data[0] << 8) | read_msg.data[1]
if raw & 0x8000:
raw -= 1 << 16
moisture = 100 - int((raw + 32768) / 65535 * 100)
return max(0, min(100, moisture))
except IOError as e:
if e.errno in (errno.EAGAIN, errno.EBUSY, errno.EINTR):
print(f"Попытка {attempt+1}/{attempts}: шина занята, повтор через 50 мс")
time.sleep(0.05)
continue
else:
raise
raise IOError("Не удалось считать данные с ADC после нескольких попыток")
def close(self):
self.i2c.close()
Объяснение: Класс SoilMoistureSensor инкапсулирует в себе все, что относится к датчику влажности почвы:
-
__init__: Конструктор класса. Он принимает путь к I2C шине и адрес АЦП, а также инициализирует I2C-соединение. -
read: Метод чтения данных с датчика. Он содержит логику взаимодействия с АЦП, включая обработку возможных ошибок, и возвращает значение влажности в процентах. -
close: Метод для закрытия соединения I2C, освобождения ресурсов. -
RTCClock:
from smbus2 import SMBus
from datetime import datetime
class RTCClock:
def __init__(self, bus_num, address):
self.bus_num = bus_num
self.address = address
def bcd2dec(self, bcd):
return (bcd >> 4) * 10 + (bcd & 0x0F)
def read_time(self):
with SMBus(self.bus_num) as bus:
data = bus.read_i2c_block_data(self.address, 0x00, 7)
return datetime(2000 + self.bcd2dec(data[6]),
self.bcd2dec(data[5]),
self.bcd2dec(data[4]),
self.bcd2dec(data[2]),
self.bcd2dec(data[1]),
self.bcd2dec(data[0]))
Объяснение: Класс RTCClock инкапсулирует работу с часами реального времени.
-
__init__: Принимает номер I2C шины и адрес RTC, сохраняя их для дальнейшего использования. -
bcd2dec: Преобразует двоично-десятичные (BCD) значения, используемые в RTC, в обычные десятичные числа. -
read_time: Считывает данные времени с RTC, преобразует их и возвращает объектdatetime. -
Relay:
import RepkaPi.GPIO as GPIO
class Relay:
def __init__(self, gpio_pin):
self.pin = gpio_pin
GPIO.setmode(GPIO.BOARD)
GPIO.setup(self.pin, GPIO.OUT, initial=GPIO.HIGH)
def on(self):
GPIO.output(self.pin, GPIO.LOW)
def off(self):
GPIO.output(self.pin, GPIO.HIGH)
def close(self):
GPIO.cleanup()
Объяснение: Класс Relay отвечает за управление реле, которое включает и выключает насос.
-
__init__: В конструкторе запоминается номер GPIO-пина, который подключен к реле, и устанавливается режим работы пина как выход (GPIO.OUT). -
on: Метод, который включает реле (устанавливает на пинеLOW). -
off: Метод, который выключает реле (устанавливает на пинеHIGH). -
close: Метод очистки GPIO. -
LCDDisplay:
from RPLCD.i2c import CharLCD
from PIL import Image, ImageDraw, ImageFont
class LCDDisplay:
def __init__(self, address=0x27, cols=16, rows=2):
self.lcd = CharLCD('PCF8574', address, cols=cols, rows=rows)
self.font = ImageFont.truetype("/usr/share/fonts/truetype/freefont/FreeSans.ttf", 14)
def show_message(self, line1, line2=""):
self.lcd.clear()
self.lcd.write_string(line1)
self.lcd.cursor_pos = (1, 0)
self.lcd.write_string(line2)
Объяснение: Класс LCDDisplay отвечает за вывод информации на LCD-дисплей.
__init__: В конструкторе создается объект дисплеяCharLCDи загружается шрифт.show_message: Очищает дисплей и выводит на него две строки текста.
2. Главный класс системы: AutomaticIrrigationSystem
Этот класс является "оркестратором". Он создает экземпляры всех классов-компонентов и управляет ими, реализуя основную логику.
# ... (импорты) ...
# ... (определение классов SoilMoistureSensor, RTCClock, Relay, LCDDisplay) ...
class AutomaticIrrigationSystem:
def __init__(self, moisture_threshold=20,
ads1115_addr=0x48, ds3231_addr=0x68, i2c_bus_num=1,
relay_gpio=11, lcd_addr=0x27):
# Создаем объекты для управления оборудованием
self.sensor = SoilMoistureSensor("/dev/i2c-1", ads1115_addr)
self.rtc = RTCClock(i2c_bus_num, ds3231_addr)
self.relay = Relay(relay_gpio)
self.lcd = LCDDisplay(address=lcd_addr)
self.moisture_threshold = moisture_threshold # порог влажности
def run(self, mode, interval=60, schedule_time=None):
"""Основной цикл работы системы"""
try:
if mode == "1": # Автополив по влажности
while True:
try:
moist = self.sensor.read()
except IOError as e:
print(f"Ошибка чтения влажности: {e}")
moist = -1
time_str = self.rtc.read_time().strftime('%H:%M:%S')
print(f"[{time_str}] Влажность: {moist}%")
self.lcd.show_message(time_str, f"Влажность: {moist}%")
if moist >= 0 and moist < self.moisture_threshold:
print("Слишком сухо — включаю насос")
self.relay.on()
time.sleep(3)
self.relay.off()
time.sleep(1)
elif mode == "2": # Полив по интервалу
while True:
time_str = self.rtc.read_time().strftime('%H:%M:%S')
self.lcd.show_message(time_str, "Полив...")
self.relay.on()
time.sleep(3)
self.relay.off()
time.sleep(interval)
elif mode == "3": # Полив по времени
while True:
now = self.rtc.read_time()
target_hour, target_min = map(int, schedule_time.split(":"))
if now.hour == target_hour and now.minute == target_min:
self.lcd.show_message("Полив", "Включение...")
self.relay.on()
time.sleep(3)
self.relay.off()
time.sleep(60) # Ждем минуту
else:
time.sleep(1)
except KeyboardInterrupt:
print("Выход...")
finally:
self.relay.off()
self.sensor.close()
self.lcd.stop_message()
self.lcd.clear()
# Точка входа
if __name__ == "__main__":
# Константы, определяющие аппаратную конфигурацию
ADS1115_ADDR = 0x48
RELAY_GPIO = 11
OLED_ADDR = 0x27
MOISTURE_THRESHOLD = 20
# Создаем объект системы
system = AutomaticIrrigationSystem(
moisture_threshold=MOISTURE_THRESHOLD,
ads1115_addr=ADS1115_ADDR,
relay_gpio=RELAY_GPIO,
lcd_addr=OLED_ADDR
)
# Запускаем выбранный режим
print("Выберите режим:")
print("1 — Автополив по влажности")
print("2 — Полив каждые N секунд")
print("3 — Полив по времени (часы RTC)")
mode = input(">>> ")
if mode == "2":
interval = int(input("Введите интервал в секундах: "))
system.run(mode, interval=interval) # передаем интервал
elif mode == "3":
schedule_time = input("Введите время для полива (ЧЧ:ММ): ")
system.run(mode, schedule_time=schedule_time) # передаем время
else:
system.run(mode) # Режим 1
Объяснение:
__init__: В конструктореAutomaticIrrigationSystemсоздаются экземпляры всех классов-компонентов: датчик влажности, часы, реле, дисплей. Все необходимые параметры (адреса, номера пинов и т.д.) передаются в конструктор, делая код более гибким.run: Этот метод реализует основной цикл работы системы. Он принимает в качестве аргументов выбранный режим работы, а также, при необходимости, интервал полива (для режима 2) или время полива (для режима 3). Внутриrunреализована логика каждого из трех режимов, которая вызывает методы созданных объектов: например,self.sensor.read()для получения данных с датчика влажности илиself.relay.on()для включения насоса.- Точка входа: Создается экземпляр
AutomaticIrrigationSystem, и вызывается методrun(), передавая в него выбранный режим работы и необходимые параметры.
Преимущества ООП:
- Модульность: Каждый компонент (датчик, реле, дисплей) представлен отдельным классом. Это делает код более организованным и позволяет легко заменять или добавлять новые компоненты.
- Повторное использование: Классы можно использовать в других проектах без изменений, достаточно просто создать объект этого класса.
- Упрощение поддержки: При необходимости внесения изменений в работу, например, по замене датчика, необходимо будет изменить только код внутри класса
SoilMoistureSensor. - Инкапсуляция: Внутренние детали реализации, такие как, например, процесс чтения данных с датчика, скрыты внутри класса
SoilMoistureSensor. Внешний код работает с датчиком через простой интерфейс, не заботясь о технических деталях.
3. Подход с использованием библиотеки RepkaPi.GPIO.SYSFS #
Импортируются необходимые библиотеки для работы с I2C, GPIO, временем, LCD-дисплеем и др:
import RepkaPi.GPIO as GPIO
from periphery import I2C
from smbus2 import SMBus
from datetime import datetime
import time
import errno
from RPLCD.i2c import CharLCD
Определяются адреса устройств на шине I2C, номер шины, пин реле и порог влажности:
ADS1115_ADDR = 0x48 # Адрес АЦП ADS1115 (датчик влажности)
DS3231_ADDR = 0x68 # Адрес RTC модуля DS3231 (часы реального времени)
I2C_BUS_NUM = 1 # Номер шины I2C (обычно 1 на Repka PI)
RELAY_GPIO = 11 # GPIO пин для управления реле (насосом)
MOISTURE_THRESHOLD = 20 # Порог влажности для включения полива (в процентах)
Инициализация I2C для работы с АЦП:
i2c_adc = I2C("/dev/i2c-1")
Функция для чтения влажности почвы с датчика через АЦП ADS1115. Возвращает влажность в процентах:
def read_soil_moisture():
"""
Считывает значение влажности почвы с датчика через АЦП ADS1115.
Возвращает значение влажности в процентах от 0 до 100.
При ошибках повторяет попытку до 5 раз.
"""
config = 0xC183 # Конфигурация для ADS1115 (одноканальный режим и др.)
attempts = 5 # Максимум 5 попыток чтения
for attempt in range(attempts):
try:
# Отправляем конфигурацию в регистр конфигурации АЦП (0x01)
i2c_adc.transfer(ADS1115_ADDR, [I2C.Message([0x01, (config >> 8) & 0xFF, config & 0xFF])])
time.sleep(0.01) # Краткая пауза для установки конфигурации
# Запрашиваем данные из регистра конверсии (0x00)
i2c_adc.transfer(ADS1115_ADDR, [I2C.Message([0x00])])
read_msg = I2C.Message([0x00, 0x00], read=True) # Подготовка к чтению 2 байт
i2c_adc.transfer(ADS1115_ADDR, [read_msg])
# Объединяем два байта в одно 16-битное число
raw = (read_msg.data[0] << 8) | read_msg.data[1]
# Преобразуем из формата с дополнительным кодом в знаковое число
if raw & 0x8000:
raw -= 1 << 16
# Преобразуем сырое значение в проценты влажности
# Чем выше raw, тем меньше влажность (инверсия)
moisture = 100 - int((raw + 32768) / 65535 * 100)
# Ограничиваем результат в диапазоне 0-100%
return max(0, min(100, moisture))
except IOError as e:
# Если шина занята (EAGAIN, EBUSY) или прервалось чтение (EINTR), повторяем
if e.errno in (errno.EAGAIN, errno.EBUSY, errno.EINTR):
print(f"Попытка {attempt+1}/{attempts}: шина занята, повтор через 50 мс")
time.sleep(0.05)
continue
else:
# При других ошибках выбрасываем исключение дальше
raise
# Если не удалось считать после всех попыток, выбрасываем ошибку
raise IOError("Не удалось считать данные с ADC после нескольких попыток")
Функция для преобразования BCD-значения в десятичное:
def bcd2dec(bcd):
return (bcd >> 4) * 10 + (bcd & 0x0F)
Функция для чтения текущего времени с RTC DS3231:
def read_time(bus):
"""
Считывает текущее время с RTC DS3231 через I2C.
Возвращает объект datetime с текущей датой и временем.
"""
# Считываем 7 байт, начиная с регистра 0x00 (секунды, минуты, часы, день, дата, месяц, год)
data = bus.read_i2c_block_data(DS3231_ADDR, 0x00, 7)
# Преобразуем BCD значения в обычные числа и создаем datetime
return datetime(2000 + bcd2dec(data[6]), # Год (от 2000)
bcd2dec(data[5]), # Месяц
bcd2dec(data[4]), # День
bcd2dec(data[2]), # Часы
bcd2dec(data[1]), # Минуты
bcd2dec(data[0])) # Секунды
Функции для включения и выключения насоса:
def water_on():
"""
Включает насос, устанавливая сигнал LOW (0) на пин реле.
"""
GPIO.output(RELAY_GPIO, GPIO.LOW) # LOW = включено
def water_off():
"""
Выключает насос, устанавливая сигнал HIGH (1) на пин реле.
"""
GPIO.output(RELAY_GPIO, GPIO.HIGH) # HIGH = выключено
Инициализация LCD-дисплея 1602 по I2C:
lcd = CharLCD('PCF8574', 0x27, cols=16, rows=2)
Функция для отображения времени и влажности на дисплее:
def display_status(time_str, moisture):
"""
Отображает текущие время и влажность на дисплее.
Первая строка — время, вторая — влажность.
"""
lcd.clear() # Очищаем дисплей перед выводом
lcd.write_string(f'Время: {time_str}') # Первая строка — время
lcd.cursor_pos = (1, 0) # Переходим на вторую строку, первый символ
lcd.write_string(f'Влажн.: {moisture}%') # Вторая строка — влажность
Основная функция программы: инициализация GPIO, выбор режима, основной цикл, логика автополива, полива по времени и по интервалу:
def main():
# --- Инициализация GPIO ---
# Устанавливаем режим нумерации пинов по их физическому расположению.
GPIO.setmode(GPIO.BOARD)
# Настраиваем пин реле как ВЫХОД и сразу выключаем насос (HIGH).
GPIO.setup(RELAY_GPIO, GPIO.OUT, initial=GPIO.HIGH)
# Меню выбора режима работы
print("Выберите режим:")
# ... остальной код функции
Реализация на C #
Язык C в связке с библиотекой WiringRP представляет собой классический подход для программирования встраиваемых систем. Он обеспечивает максимальную производительность, низкое потребление ресурсов и полный, прямой контроль над аппаратным обеспечением, что является стандартом для надежной и предсказуемой работы устройств.
1. Реализация с WiringRP #
Данный проект демонстрирует профессиональный подход к разработке на C, используя модульную структуру. Для каждого аппаратного компонента создан свой "драйвер" в виде пары файлов: заголовочного (.h) и файла реализации (.c). Это делает код чистым, переиспользуемым и легким для отладки.
Структура проекта:
main.c: Содержит основную логику приложения, инициализацию всех модулей и главный цикл работы.water_pump/: Модуль для управления реле насоса.soil_sensor_ads1115/: Драйвер для чтения данных с датчика влажности через АЦП ADS1115.rtc_ds3231/: Модуль для взаимодействия с часами реального времени DS3231.lcd1602_i2c/: Драйвер для управления LCD-дисплеем 1602 по шине I2C.
Основной файл логики (main.c)
Этот файл является точкой входа и "мозгом" всей системы. Он инициализирует все модули и реализует логику выбора и выполнения режимов полива.
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
#include <wiringrp/wiringRP.h>
#include <wiringrp/wire.h>
// Подключение заголовочных файлов всех модулей
#include "lcd1602_i2c/lcd1602_i2c.h"
#include "rtc_ds3231/rtc_ds3231.h"
#include "soil_sensor_ads1115/soil_sensor.h"
#include "water_pump/water_pump.h"
// ... (определение констант и глобальных переменных) ...
void setup() {
// Инициализация библиотеки WiringRP
if (setupWiringRP(WRP_MODE_PHYS) < 0) exit(EXIT_FAILURE);
// Инициализация каждого аппаратного модуля
pump_init(PUMP_PIN);
if (lcd_init(I2C_BUS_ID, LCD_ADDR) < 0) exit(EXIT_FAILURE);
if (rtc_init(I2C_BUS_ID, DS3231_ADDR) < 0) exit(EXIT_FAILURE);
if (soil_sensor_init(I2C_BUS_ID, ADS1115_ADDR) < 0) exit(EXIT_FAILURE);
// ... (код для меню выбора режима) ...
}
void loop() {
// ... (код главного цикла с логикой режимов) ...
}
ONDESTROY() {
// ... (код безопасного завершения работы) ...
}
MAIN_WIRINGRP();
Объяснение:
- Структура
setup()иloop(): БиблиотекаWiringRPпредоставляет макросыMAIN_WIRINGRP(),setup()иloop(), которые эмулируют привычную и удобную среду программирования Arduino. Код вsetup()выполняется один раз при старте для инициализации всех систем, аloop()— в бесконечном цикле, реализуя основную логику. - Инициализация: В
setup()последовательно вызываются функции..._init()из каждого модуля, передавая им необходимые параметры (номера пинов, адреса I2C). - Основной цикл
loop(): Здесь реализована вся логика, описанная в блок-схеме. Каждую итерацию считываются данные с датчиков (rtc_get_time,soil_sensor_read_moisture), обновляется дисплей, и конструкцияswitch(mode)выполняет действия в соответствии с режимом, выбранным пользователем при старте. - Безопасное завершение
ONDESTROY(): Этот макрос регистрирует функцию, которая будет вызвана при завершении программы (например, поCtrl+C). Это гарантирует, что насос будет выключен, а все аппаратные ресурсы — корректно освобождены.
Модули управления (water_pump, rtc_ds3231, lcd1602_i2c)
Эти модули предоставляют простой и понятный интерфейс для управления сложным оборудованием.
// Пример заголовочного файла water_pump.h
#ifndef WATER_PUMP_H
#define WATER_PUMP_H
void pump_init(int pin);
void pump_on(void);
void pump_off(void);
#endif
Объяснение: Каждый модуль скрывает (инкапсулирует) в себе детали реализации. Например, main.c не знает, как именно работает протокол I2C для дисплея или какой уровень сигнала (HIGH или LOW) включает реле. Он просто вызывает понятные функции: lcd_print("Hello"), pump_on(), rtc_get_time(). Это делает основной код чистым, а модули — переиспользуемыми в других проектах.
Модуль датчика влажности (soil_sensor.c)
Этот модуль отвечает за взаимодействие с АЦП ADS1115 для получения данных с аналогового датчика.
// Фрагмент из soil_sensor.c
#include "soil_sensor.h"
#include <wiringrp/wiringRP.h>
#include <wiringrp/wire.h>
int soil_sensor_read_moisture(void) {
// ...
// Записываем конфиг в регистр 0x01
i2cWriteReg16(i2c_fd, 0x01, swapped_config);
delay(10);
// Читаем 16-битное значение из регистра 0x00
int raw_adc = i2cReadReg16(i2c_fd, 0x00);
// ...
// Переворачиваем байты
raw_adc = ((raw_adc & 0xFF) << 8) | (raw_adc >> 8);
// Преобразуем "сырое" значение в проценты по формуле калибровки
const int DRY_VALUE = 26000;
const int WET_VALUE = 11000;
long moisture_long = 100L - ((long)(raw_adc - WET_VALUE) * 100L) / (DRY_VALUE - WET_VALUE);
return (int)moisture_long;
}
Объяснение: Функция soil_sensor_read_moisture — прекрасный пример низкоуровневой работы. Она использует функции i2cWriteReg16 и i2cReadReg16 из библиотеки WiringRP для прямого обмена 16-битными данными с регистрами АЦП по шине I2C. Важным шагом является калибровка: raw_adc — это просто число от АЦП. Чтобы превратить его в понятные проценты, используются константы DRY_VALUE и WET_VALUE, которые определяют показания датчика в абсолютно сухой и абсолютно мокрой почве соответственно. Эти значения, возможно, потребуется подобрать экспериментально для вашего конкретного датчика и типа почвы.
2. Гибридный подход (Python + WiringRP) #
Этот мощный подход сочетает в себе лучшее из двух миров: простоту и гибкость Python для написания основной логики и высокую производительность и прямой доступ к аппаратуре C для выполнения критичных операций.
Идея заключается в том, чтобы из Python-скрипта напрямую вызывать функции уже скомпилированной C-библиотеки libwiringrp.so. Это позволяет получить доступ к низкоуровневым возможностям, которые могут быть быстрее или точнее, чем их аналоги в Python-библиотеках, работающих через ядро Linux. В данном проекте мы используем этот метод для управления GPIO.
1. Загрузка C-библиотеки и определение функций
Первым шагом является загрузка общей библиотеки libwiringrp.so в Python-скрипт с помощью стандартного модуля ctypes.
import ctypes
# --- 1. Настройка библиотеки WiringRP через ctypes ---
try:
wiringrp = ctypes.CDLL("libwiringrp.so")
except OSError:
print("Ошибка: Не удалось найти 'libwiringrp.so'.")
exit(1)
# Определение прототипов функций
wiringrp.setupWiringRP.argtypes = [ctypes.c_int]
wiringrp.setupWiringRP.restype = ctypes.c_int
wiringrp.pinMode.argtypes = [ctypes.c_int, ctypes.c_int]
wiringrp.digitalWrite.argtypes = [ctypes.c_int, ctypes.c_int]
wiringrp.releaseWiringRP.argtypes = []
Объяснение:
ctypes.CDLL("libwiringrp.so")загружает C-библиотеку в память и предоставляет объектwiringrp, через который можно обращаться к ее функциям, как будто это обычные Python-функции.- Определение прототипов (
argtypes,restype): Это критически важный шаг. Мы явно указываем Python, какие типы данных (целые числа -c_int, без возврата -Noneи т.д.) ожидает каждая C-функция и какой тип данных она возвращает. Это гарантирует корректную и безопасную передачу данных между двумя языками.
2. Обновление низкоуровневых функций
Теперь мы можем переписать функции, отвечающие за управление GPIO, заменив вызовы Python-библиотеки periphery.GPIO на прямые вызовы функций из wiringrp.
# Константы для WiringRP
WRP_MODE_PHYS = 1
OUTPUT = 1
HIGH = 1
LOW = 0
# Пин реле
RELAY_GPIO = 11
# === Управление реле (насосом) с использованием WiringRP ===
def water_on():
"""Включает насос, устанавливая сигнал LOW (0) на пин реле."""
wiringrp.digitalWrite(RELAY_GPIO, LOW) # Вызов C-функции
def water_off():
"""Выключает насос, устанавливая сигнал HIGH (1) на пин реле."""
wiringrp.digitalWrite(RELAY_GPIO, HIGH) # Вызов C-функции
Объяснение: Функции water_on() и water_off() теперь напрямую вызывают wiringrp.digitalWrite(). Этот вызов — это "мост" из мира Python в мир C. Он выполняется с нативной скоростью C, обеспечивая максимально быструю реакцию GPIO-пина без накладных расходов интерпретатора Python и системных вызовов в файловую систему SysFS.
3. Основная логика и Инициализация/Очистка
Важно отметить, что вся остальная часть программы, отвечающая за бизнес-логику и работу с I2C, остается неизменной. Мы просто "подменили" реализацию управления GPIO.
# === Основная логика программы ===
def main():
try:
# --- Инициализация WiringRP ---
if wiringrp.setupWiringRP(WRP_MODE_PHYS) < 0:
raise RuntimeError("Ошибка инициализации WiringRP. Запустите с sudo.")
# Настраиваем пин реле как ВЫХОД и сразу выключаем насос
wiringrp.pinMode(RELAY_GPIO, OUTPUT)
water_off()
# ... (далее идет тот же самый главный цикл, что и в функциональном подходе) ...
# ... он вызывает обновленные water_on()/water_off() ...
except (KeyboardInterrupt, RuntimeError) as e:
print(f"Выход... {e}")
finally:
# --- Очистка ресурсов ---
print("Освобождение ресурсов...")
water_off()
wiringrp.pinMode(RELAY_GPIO, DISABLE) # Отключаем пин
wiringrp.releaseWiringRP() # Освобождаем библиотеку
i2c_adc.close()
lcd.clear()
lcd.write_string("Система остановлена")
if __name__ == "__main__":
main()
Объяснение:
- Инициализация: Перед входом в основной цикл мы инициализируем библиотеку
wiringrpвызовомwiringrp.setupWiringRP()и настраиваем нужный GPIO-пин в режимOUTPUTс помощьюwiringrp.pinMode(). - Основной цикл: Код внутри
while Trueостается прежним, что демонстрирует главное
Запуск проекта
Теперь, когда все компоненты подключены, можно запустить проект "Автоматическая системы полива". Для этого в репозитории repka-pi_iot-examples выполняем команду:
make automatic-irrigation-system
Мы можем увидеть консольный интерфейс приложения и выбрать нужный пункт:


Сравнение производительности: RepkaPi.GPIO (SysFS) vs WiringRP #
В рамках наших проектов мы использовали два разных подхода для взаимодействия с GPIO-пинами:
- Python с библиотекой
RepkaPi.GPIO: Высокоуровневый подход, работающий через стандартный интерфейс ядра Linux SysFS. - C с библиотекой
WiringRP: Низкоуровневый подход, работающий максимально близко к "железу" через прямой доступ к памяти.
Возникает логичный вопрос: насколько велика разница в производительности и когда какой подход следует выбирать? Для ответа на этот вопрос был проведен объективный тест — бенчмарк.
Методика тестирования #
Чтобы измерить чистую скорость работы с GPIO, была поставлена простая задача: переключать один и тот же GPIO-пин из высокого состояния (HIGH) в низкое (LOW) и обратно так быстро, как это возможно, в течение 5 секунд. Эта операция "включить-выключить" является фундаментальной для любого проекта, работающего с GPIO, и ее скорость напрямую отражает эффективность используемой библиотеки.
Были написаны два минималистичных скрипта, реализующих этот тест.
Код на C с WiringRP
// benchmark_c_counter.c
#include <wiringrp/wiringRP.h>
#include <stdio.h>
#include <time.h>
#define TEST_PIN 7
#define BENCHMARK_DURATION 5
int main(void) {
unsigned long long counter = 0;
time_t start_time = time(NULL);
if (setupWiringRP(WRP_MODE_PHYS) < 0) return 1;
pinMode(TEST_PIN, OUTPUT);
while (1) {
digitalWrite(TEST_PIN, HIGH);
digitalWrite(TEST_PIN, LOW);
counter++;
if (time(NULL) - start_time >= BENCHMARK_DURATION) {
break;
}
}
printf("Операций в секунду: %llu ops/sec\n", counter / BENCHMARK_DURATION);
return 0;
}
Код на Python с RepkaPi.GPIO
# benchmark_c_counter.py
import RepkaPi.GPIO as GPIO
import time
TEST_PIN = 7
BENCHMARK_DURATION = 5
GPIO.setmode(GPIO.BOARD)
GPIO.setup(TEST_PIN, GPIO.OUT)
counter = 0
start_time = time.time()
try:
while True:
GPIO.output(TEST_PIN, GPIO.HIGH)
GPIO.output(TEST_PIN, GPIO.LOW)
counter += 1
if time.time() - start_time >= BENCHMARK_DURATION:
break
finally:
GPIO.cleanup()
print(f"Операций в секунду: {counter // BENCHMARK_DURATION} ops/sec")
Результаты #
После компиляции C-кода и запуска обоих скриптов на Repka Pi были получены следующие результаты:
| Подход | Операций в секунду (ops/sec) |
|---|---|
| Python + RepkaPi.GPIO (SysFS) | ~6,679 |
| C + WiringRP (прямой доступ) | ~484,638 |
Анализ результатов #
Как видно из таблицы, разница в производительности колоссальна: подход на C с использованием WiringRP оказался примерно в 72 раза быстрее, чем его аналог на Python. Эта разница обусловлена фундаментальными различиями в том, как эти библиотеки взаимодействуют с оборудованием.
-
WiringRP(C):- Компилируемый язык: Код на C преобразуется в нативные машинные инструкции, которые выполняются процессором напрямую без посредников.
- Прямой доступ к памяти (
/dev/mem):WiringRPизменяет состояние GPIO-пина путем прямой записи нужных значений в физические адреса памяти, где расположены регистры управления GPIO. С точки зрения системы, это одна быстрая операция записи в память.
-
RepkaPi.GPIO(Python):- Интерпретируемый язык: Код на Python выполняется через интерпретатор, который добавляет свои, хоть и небольшие, накладные расходы.
- Интерфейс SysFS: Это ключевое отличие. Библиотека
RepkaPi.GPIOработает через стандартный для Linux интерфейс SysFS. Для операционной системы GPIO-пины представлены в виде файлов в директории/sys/class/gpio/. Чтобы изменить состояние пина, библиотека выполняет целую последовательность действий:- Отправляет системный вызов на открытие файла (например,
/sys/class/gpio/gpio7/value). - Отправляет системный вызов на запись в этот файл символа "1" или "0".
- Отправляет системный вызов на закрытие файла.
- Отправляет системный вызов на открытие файла (например,
Каждый такой системный вызов требует переключения контекста между пользовательским пространством (где работает наш скрипт) и пространством ядра, что является относительно медленной операцией. Таким образом, одно простое действие GPIO.output() на самом деле порождает целую цепочку более медленных файловых операций.
Выводы и рекомендации #
Означают ли эти результаты, что RepkaPi.GPIO — плохая библиотека? Однозначно нет. Выбор инструмента всегда зависит от задачи.
-
Когда использовать Python и
RepkaPi.GPIO? Почти всегда. Во всех проектах, которые мы рассмотрели (метеостанция, система полива, парктроник, RFID-сейф), основной цикл программы имеет задержку от сотен миллисекунд до нескольких секунд (time.sleep(1)). На фоне таких задержек разница в скорости выполненияGPIO.output()в несколько микросекунд абсолютно несущественна. Преимущества Python — скорость разработки, простота отладки, читаемость кода и огромное количество готовых библиотек — многократно перевешивают проигрыш в "чистой" производительности GPIO. -
Когда использовать C и
WiringRP?WiringRPи C становятся незаменимы, когда требуется работа в реальном времени или генерация высокочастотных сигналов. Например:- Программная реализация протоколов связи (например, "bit-banging" I2C или SPI).
- Управление устройствами, требующими очень точных и коротких импульсов, недостижимых с помощью
time.sleep(). - Приложения, где критически важна минимальная и предсказуемая задержка реакции на событие.
Итог: Для подавляющего большинства образовательных и хобби-проектов удобство и скорость разработки на Python с RepkaPi.GPIO являются предпочтительным выбором. К мощи и производительности C и WiringRP следует обращаться тогда, когда вы точно знаете, что ваш проект упирается в пределы скорости или точности, которые может предоставить Python.
Практическая значимость проекта
Проект "Автоматизированная система полива" представляет собой практическое решение для автоматизации процесса полива растений, что значительно упрощает уход за растениями и повышает эффективность использования воды. Система позволяет автоматизировать процесс полива на основе различных параметров: уровня влажности почвы, времени или заданных интервалов. Это не только экономит ресурсы, но и позволяет обеспечить растения необходимым уходом в зависимости от их потребностей. Применение данной системы может быть полезным как для домашних пользователей, так и для небольших аграрных хозяйств, где требуется автоматизация полива для оптимизации труда и использования воды.
Кроме того, проект способствует развитию навыков в области программирования, работы с датчиками и микроконтроллерами, а также применению теоретических знаний в реальных задачах. Он может быть использован в образовательных целях, помогая студентам и специалистам познакомиться с основами автоматизации и интернета вещей (IoT).
Расширение проекта
Расширение проекта может включать внедрение дополнительных функций и возможностей для улучшения работы системы полива. Некоторые идеи для расширения:
-
Интеграция с мобильным приложением: Возможность управления системой полива через смартфон или планшет. Пользователи смогут настраивать параметры полива, проверять состояние датчиков и получать уведомления о статусе полива.
-
Использование солнечных панелей: Для автономной работы системы полива можно добавить солнечные панели для питания помпы и других компонентов, что сделает систему более экологичной и экономичной.
-
Интеграция с погодными сервисами: Система может учитывать данные о погодных условиях, такие как дождь или температура, чтобы регулировать полив, снижая расход воды в случае дождя или повышая его в сухую погоду.
-
Подключение дополнительных датчиков: Например, датчики температуры и влажности воздуха, что позволит точнее контролировать климатические условия для растений.
-
Использование более сложных алгоритмов: Внедрение алгоритмов машинного обучения для предсказания потребностей растений в поливе на основе собранных данных, что повысит эффективность системы.
-
Интеграция с другими системами умного дома: Система полива может быть интегрирована с другими устройствами умного дома, такими как умные термостаты или освещение, для создания комплексного решения по автоматизации домашнего ухода за растениями.
Видеообзор проекта
Для более детального ознакомления с проектом, вы можете посмотреть видеообзор на платформе Rutube:
Пример использования с Python
Проект полностью реализован на языке Python. Код для работы с автоматической системой полива можно найти в репозитории на платформе Gitflic.