Попробуем сделать сегодня что-нибудь полезное. Думаю, по заголовку многие уже поняли, что именно. А если нет - напомню про существование такого интерфейса под названием RS/TIA/EIA-485. Несмотря на возраст, до сих пор ставится в массу датчиков, приборов и прочего оборудования. И, судя по всему, ставиться будет ещё долго. В качестве протокола верхнего уровня здесь чаще всего используют MODBUS-RTU, несмотря на его недостатки и ограничения. Более подробно об этом можно почитать, например, здесь. В попытке осовременить этого динозавра протокол была придумана его модификация MODBUS TCP/IP, в которой, как не сложно догадаться, типовые MODBUS-пакеты пропихиваются по TCP/IP сетям. Это позволило скрестить ежа с ужом подключить к современным сетям всю эту гору оборудования, не переделывая её начинку. И организовать доступ к данным хоть на край света по удалёнке через Internet! Достаточно взять специальную коробку-конвертер и немного модифицировать софт верхнего уровня.
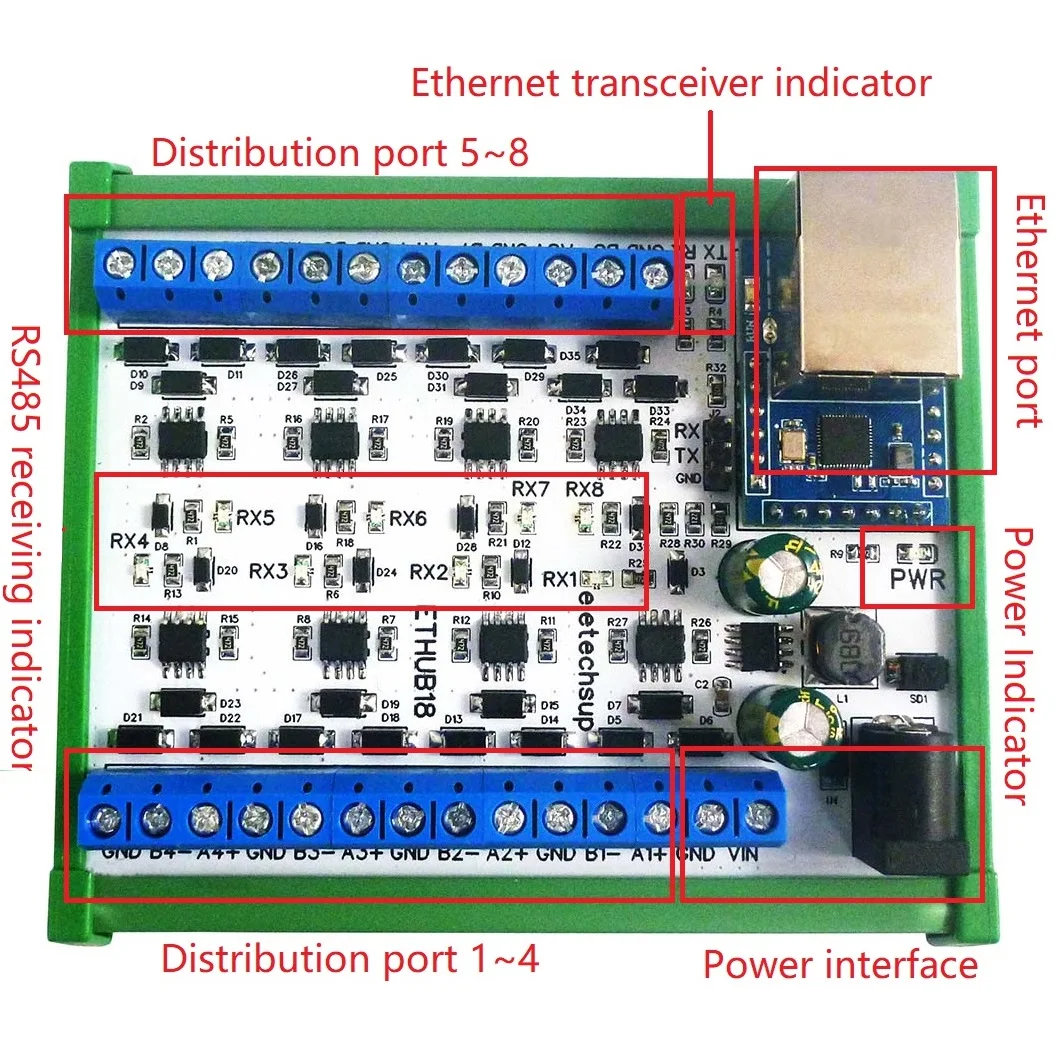
Что же это за коробка такая? С одной стороны у неё ethernet, wi-fi или даже какой-нибудь 5G модем. А с другой - старые добрые порты RS-232, RS-422, RS-485.



Путём нехитрых преобразований коробка перебрасывает MODBUS-пакеты туда-обратно. Делают их сейчас все, кому не лень! Начиная от брендов, вроде MOXA или ICP-DAS до неведомых кетайцев вроде HI-FLYING, USR IOT, тысячи их, разной степеникривизны качества. Внутри такой коробки, как правило, прячется типичная SoC для интернетовских точек доступа, несколько драйверов интерфейса, да какая-нибудь обвязка по питанию.

А раз так, быть может, и на основе неспециализированного компьютера можно поднять такой конвертер? Например, на...Репке?
И да, это возможно! Благодаря проекту MBUSD от Юрия Антоновича. Как несложно понять, это сервер под линуксовые (главным образом) машины. Несмотря на то, что проект, вроде как, ещё не выбрался из альфа-стадии, он вполне стабильный и универсальный. Достаточно, чтобы комп имел на борту необходимые порты (либо дооснастить его ими).
Как несложно понять, это сервер под линуксовые (главным образом) машины. Несмотря на то, что проект, вроде как, ещё не выбрался из альфа-стадии, он вполне стабильный и универсальный. Достаточно, чтобы комп имел на борту необходимые порты (либо дооснастить его ими).
И универсальность его заключается, в том числе, вот в каком моменте:
Напомним, что RS-485 это полудуплексный интерфейс. В каждый момент времени он может либо принимать, либо передавать. И для чипов драйверов важно осуществлять своевременную коммутацию режима работы! Как же эту проблему решить?
Готовый вариант - взять кетайский переходник USB-RS485, вроде такого
 В нём схема коммутации уже встроена, той или иной степени надёжности. Пользователю в линуксах, после того, как её подхватят драйвера, достаточно использовать появившийся порт вроде /dev/ttyUSB0
В нём схема коммутации уже встроена, той или иной степени надёжности. Пользователю в линуксах, после того, как её подхватят драйвера, достаточно использовать появившийся порт вроде /dev/ttyUSB0
Другой вариант - аппаратная схема автоматической коммутации. Бывают готовые специальные чипы драйверы, которые сами выбирают, в каком режиме им работать (например, MAX13487), бывают отдельные решения (например, вот эта схема хорошо работает).
Но MBUSD в состоянии и сам выполнять коммутацию приём-передача, что в теории, наверно, должно работать стабильнее и более предсказуемо. Для чего автор заложил в него три метода:
В первом случае он может использовать возможности линукс-драйвера под какие-то аппаратные реализации RS-485 для встраиваемых систем, наверно...в жизни такие мне не попадались.
Может он для коммутации задействовать вывод RTS, который присутствует в стандартном RS-232. Либо он может быть выведен в миникомпьютерах на пины для подключения шилд. Но есть ли у Репы такой выход? Смотрим на схему и убеждаемся, что ни в одной из "распиновок" его нет.
Но не беда, есть ведь ещё и третий метод: MBUSD умеет дёргать GPIO-выходы через линксовую SysFS. В интернетах много бурлений о том, что, мол, SysFS - это жуткое легаси, хватит на нём сидеть, нормальные проггеры пользуют UAPI. Что тут скажешь, MODBUS сам по себе ещё то замшелое легаси. Для нас главное, что "Repka-OS" его поддерживает нормально. А также то, что на гребёнку выведены сигналы UART, хотя бы один GPIO и питание.
Для нас главное, что "Repka-OS" его поддерживает нормально. А также то, что на гребёнку выведены сигналы UART, хотя бы один GPIO и питание.
Именно по этому пути я и решил пойти, сделав свою "шилду". Здесь можно посмотреть схему данной поделки. Делал на том, что было под рукой, наверняка вы возьмёте другую элементную базу. По крайней мере, имеется гальваническая развязка и базовая защита выхода от статики. Подключаем плату к верхней части гребёнки (контакты 1...10) через шлейф. Разъём XP2 я сделал для себя, чтобы подключать ранее сделанную "шилду" с часами DS3232. XP3 и XP4 выводят питание, на всякий случай (например, к XP3 я подключаю корпусной вентилятор). Вот как это всё сейча выглядит:

Да, надо будет хоть какую-нибудь коробочку под плату пристроить...
А теперь установим MBUSD. В репозитарии его похоже что нет, так что компиляем из исходников:
устанавливаем CMAKE, если у вас его вдруг ещё нет
Дальше просто следуйте Installation instructions с Гитхаб. Установим, но запускать пока не будем.
Всё скомпилировалось быстро и в целом без ошибок. На всякий случай уточню, что у меня сейчас стоит ядро 5.19.16.
Если будете задействовать UART0, как у меня, то следует также отключить вывод отладочных сообщений в него: здесь смотрим пункт Отключение / включение отладочного терминала на UART0.
Настроим конфиг-файл. Для этого я в каталоге /etc/mbusd беру файл mbusd.conf.example и копирую его с именем mbusd-ttyS0.conf Как несложно заметить, его имя содержит название UART-а, который я собираюсь задействовать для своего переходника. Редактирую его следующим образом:
Обратите внимание на строку # Serial port speed, где задаётся скорость интерфейса.
Кроме того, задаём режим работы с SysFS trx_control = sysfs_1, а также путь к файлу, который будет в данном процессе задействован: trx_sysfile = /sys/class/gpio/gpio7/value. Как видно из схемы, я задействую GPIO7.
Теперь настало время подключить эту самую GPIO7 к SysFS, иначе чуда не произойдёт. Я решил сделать это по красоте, как некто предложил вот здесь:
В каталоге /etc/init.d/ создал скрипт под именем gpio_init:
Меняем ему владельца на root.root и ставим права 755.
В /usr/local/bin/ создал скрипт вод именем gpio-init такого содержания:
Ставим ему права 755.
Активируем запуск скрипта при загрузке
Перезагружаем Репку. Теперь при загрузке GPIO7 настроена выходом и по уполчанию выводит 0.
Осталось запустить MBUSD?
Вроде запустилось...да не тут-то было! Из локалки доступа к серверу как не было, так и нет. Вводим sudo systemctl status mbusd@ttyS0.service и убеждаемся, что MBUSD запустился. Вводим команду ss -tlp и убеждаемся, что 502 порт всё-таки наш сервер прослушивает. Ну конечно, порт зарезал фаервол, в качестве которого у меня стоит nftables, но у вас может быть что-то иное. Разрешим в nftables.conf доступ:
И вот, наконец, всё заработало. Теперь можно подключиться к Репе и считать данные, например, с регистров вольтметра

Что же это за коробка такая? С одной стороны у неё ethernet, wi-fi или даже какой-нибудь 5G модем. А с другой - старые добрые порты RS-232, RS-422, RS-485.
Путём нехитрых преобразований коробка перебрасывает MODBUS-пакеты туда-обратно. Делают их сейчас все, кому не лень! Начиная от брендов, вроде MOXA или ICP-DAS до неведомых кетайцев вроде HI-FLYING, USR IOT, тысячи их, разной степени
А раз так, быть может, и на основе неспециализированного компьютера можно поднять такой конвертер? Например, на...Репке?
И да, это возможно! Благодаря проекту MBUSD от Юрия Антоновича.
Как несложно понять, это сервер под линуксовые (главным образом) машины. Несмотря на то, что проект, вроде как, ещё не выбрался из альфа-стадии, он вполне стабильный и универсальный. Достаточно, чтобы комп имел на борту необходимые порты (либо дооснастить его ими).И универсальность его заключается, в том числе, вот в каком моменте:
Напомним, что RS-485 это полудуплексный интерфейс. В каждый момент времени он может либо принимать, либо передавать. И для чипов драйверов важно осуществлять своевременную коммутацию режима работы! Как же эту проблему решить?
Готовый вариант - взять кетайский переходник USB-RS485, вроде такого
Другой вариант - аппаратная схема автоматической коммутации. Бывают готовые специальные чипы драйверы, которые сами выбирают, в каком режиме им работать (например, MAX13487), бывают отдельные решения (например, вот эта схема хорошо работает).
Но MBUSD в состоянии и сам выполнять коммутацию приём-передача, что в теории, наверно, должно работать стабильнее и более предсказуемо. Для чего автор заложил в него три метода:
В первом случае он может использовать возможности линукс-драйвера под какие-то аппаратные реализации RS-485 для встраиваемых систем, наверно...в жизни такие мне не попадались.
Может он для коммутации задействовать вывод RTS, который присутствует в стандартном RS-232. Либо он может быть выведен в миникомпьютерах на пины для подключения шилд. Но есть ли у Репы такой выход? Смотрим на схему и убеждаемся, что ни в одной из "распиновок" его нет.
Но не беда, есть ведь ещё и третий метод: MBUSD умеет дёргать GPIO-выходы через линксовую SysFS. В интернетах много бурлений о том, что, мол, SysFS - это жуткое легаси, хватит на нём сидеть, нормальные проггеры пользуют UAPI. Что тут скажешь, MODBUS сам по себе ещё то замшелое легаси.
Для нас главное, что "Repka-OS" его поддерживает нормально. А также то, что на гребёнку выведены сигналы UART, хотя бы один GPIO и питание.Именно по этому пути я и решил пойти, сделав свою "шилду". Здесь можно посмотреть схему данной поделки. Делал на том, что было под рукой, наверняка вы возьмёте другую элементную базу. По крайней мере, имеется гальваническая развязка и базовая защита выхода от статики. Подключаем плату к верхней части гребёнки (контакты 1...10) через шлейф. Разъём XP2 я сделал для себя, чтобы подключать ранее сделанную "шилду" с часами DS3232. XP3 и XP4 выводят питание, на всякий случай (например, к XP3 я подключаю корпусной вентилятор). Вот как это всё сейча выглядит:
Да, надо будет хоть какую-нибудь коробочку под плату пристроить...
А теперь установим MBUSD. В репозитарии его похоже что нет, так что компиляем из исходников:
устанавливаем CMAKE, если у вас его вдруг ещё нет
Bash:
sudo apt-get install cmakeВсё скомпилировалось быстро и в целом без ошибок. На всякий случай уточню, что у меня сейчас стоит ядро 5.19.16.
Если будете задействовать UART0, как у меня, то следует также отключить вывод отладочных сообщений в него: здесь смотрим пункт Отключение / включение отладочного терминала на UART0.
Настроим конфиг-файл. Для этого я в каталоге /etc/mbusd беру файл mbusd.conf.example и копирую его с именем mbusd-ttyS0.conf Как несложно заметить, его имя содержит название UART-а, который я собираюсь задействовать для своего переходника. Редактирую его следующим образом:
Bash:
#############################################
# #
# Sample configuration file for mbusd #
# #
#############################################
########## Logging settings #############
# Logging verbosity level
loglevel = 1
# Logfile (fully-qualified path, or filename [stored at /var/log/] or - for STDOUT only)
logfile = /var/log/mbusd.log
########## Serial port settings #############
# Serial port device name
device = /dev/ttyS0
# Serial port speed
speed = 19200
# Serial port mode
mode = 8n1
# Enable RS-485 support for given serial port device (Linux only)
enable_rs485 = no
# RS-485 data direction control type (addc, rts_0, rts/rts_1, sysfs_0, sysfs_1)
trx_control = sysfs_1
# Sysfs file to use to control data direction
trx_sysfile = /sys/class/gpio/gpio7/value
############# TCP port settings #############
# TCP server address to bind
address = 0.0.0.0
# TCP server port number
port = 502
# Maximum number of simultaneous TCP connections
maxconn = 32
# Connection timeout value in seconds
timeout = 60
######### Request/response settings #########
# Maximum number of request retries
retries = 3
# Pause between requests in milliseconds
pause = 20
# Response wait time in milliseconds
wait = 200
# Reply on Broadcast
replyonbroadcast = noОбратите внимание на строку # Serial port speed, где задаётся скорость интерфейса.
Кроме того, задаём режим работы с SysFS trx_control = sysfs_1, а также путь к файлу, который будет в данном процессе задействован: trx_sysfile = /sys/class/gpio/gpio7/value. Как видно из схемы, я задействую GPIO7.
Теперь настало время подключить эту самую GPIO7 к SysFS, иначе чуда не произойдёт. Я решил сделать это по красоте, как некто предложил вот здесь:
В каталоге /etc/init.d/ создал скрипт под именем gpio_init:
Bash:
#!/bin/sh
### BEGIN INIT INFO
# Provides: gpio_init
# Required-Start: $local_fs $network $named $time $syslog
# Required-Stop: $local_fs $network $named $time $syslog
# Default-Start: 2 3 4 5
# Default-Stop: 0 1 6
# Description: Initialize GPIO pins for the project
### END INIT INFO
SCRIPT=/usr/local/bin/gpio-init
RUNAS=root
PIDFILE=/var/run/gpio_init.pid
LOGFILE=/var/log/gpio_init.log
start() {
if [ -f /var/run/$PIDNAME ] && kill -0 $(cat /var/run/$PIDNAME); then
echo 'Service already running' >&2
return 1
fi
echo 'Starting service…' >&2
local CMD="$SCRIPT &> \"$LOGFILE\" & echo \$!"
su -c "$CMD" $RUNAS > "$PIDFILE"
echo 'Service started' >&2
}
stop() {
if [ ! -f "$PIDFILE" ] || ! kill -0 $(cat "$PIDFILE"); then
echo 'Service not running' >&2
return 1
fi
echo 'Stopping service…' >&2
kill -15 $(cat "$PIDFILE") && rm -f "$PIDFILE"
echo 'Service stopped' >&2
}
uninstall() {
echo -n "Are you really sure you want to uninstall this service? That cannot be undone. [yes|No] "
local SURE
read SURE
if [ "$SURE" = "yes" ]; then
stop
rm -f "$PIDFILE"
echo "Notice: log file is not be removed: '$LOGFILE'" >&2
update-rc.d -f gpio_init remove
rm -fv "$0"
fi
}
case "$1" in
start)
start
;;
stop)
stop
;;
uninstall)
uninstall
;;
retart)
stop
start
;;
*)
echo "Usage: $0 {start|stop|restart|uninstall}"
esacВ /usr/local/bin/ создал скрипт вод именем gpio-init такого содержания:
Bash:
#! /bin/bash
function cleanup {
echo 7 > /sys/class/gpio/unexport
exit 0
}
# Clean up when exit
trap cleanup EXIT
trap cleanup SIGHUP
trap cleanup SIGQUIT
trap cleanup SIGINT
trap cleanup SIGTERM
echo 7 > /sys/class/gpio/export
echo "out" > /sys/class/gpio/gpio7/direction
echo 0 > /sys/class/gpio/gpio7/value
sleep infinity
exit 0Активируем запуск скрипта при загрузке
Bash:
sudo update-rc.d gpio-init defaultsОсталось запустить MBUSD?
Bash:
sudo systemctl enable mbusd@ttyS0.service
sudo systemctl start mbusd@ttyS0.service
Bash:
table inet filter {
chain input {
.
.
.
.
.
.
tcp dport 502 accept comment "Accept MODBUS TCP/IP Service"
}
{kind=link}