Всем привет!
Наверняка многие из вас, как и мы, сталкивались с такой ситуацией: вы берете в руки новый одноплатный компьютер — в нашем случае это Repka Pi — подключаете к нему светодиод и... задаетесь вопросом: "А как этим управлять?".
Искать в даташите адреса регистров и писать в /dev/mem с риском "окирпичить" плату? Использовать низкоуровневые утилиты? Запускать каждый скрипт от root? Все это кажется слишком сложным и небезопасным для простого старта, особенно для устройства, которое мы позиционируем как доступный инструмент для инженеров и DIY-сообщества.
Мы хотели, чтобы работа с GPIO на нашей плате была такой же простой и привычной, как на Raspberry Pi. Поэтому мы создали, а недавно полностью переработали и портировали на Repka Pi 4 нашу библиотеку.
Представляем RepkaPi.GPIO: знакомый API на новой плате #
RepkaPi.GPIO — это Python-библиотека для управления контактами ввода-вывода, API которой максимально совместим с популярной RPi.GPIO.
Мы не стали изобретать велосипед. Огромное количество проектов, туториалов и готовых скриптов в мире DIY написано для Raspberry Pi. Нашей главной целью было дать возможность легко переносить этот код на наши одноплатные компьютеры. Если вы знаете, как мигать светодиодом на "малинке", вы сможете сделать это и на "репке", практически не меняя код:
# Этот код будет знаком многим
import RepkaPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD)
GPIO.setup(7, GPIO.OUT)
GPIO.output(7, GPIO.HIGH)
Но за этой простой и знакомой оболочкой скрывается большая работа по адаптации к архитектуре Repka Pi и обеспечению безопасности.
Под капотом: от sysfs к драйверу ядра — история одного компромисса #
При разработке мы сразу определили для себя главный принцип: библиотека должна быть безопасной и удобной. Это привело нас к выбору sysfs — стандартного интерфейса ядра Linux.
Путь №1: sysfs. Безопасно, но с нюансами
Вместо прямого доступа к памяти (/dev/mem), который хоть и быстр, но невероятно опасен и требует прав root, мы использовали sysfs. Ядро само предоставляет "файлы" для управления пинами, которые можно читать и в которые можно писать. Это стабильно, предсказуемо и не позволяет опечаткой в коде "окирпичить" плату.
Все шло отлично, пока мы не добрались до функции управления внутренними подтягивающими резисторами (pull-up/pull-down). Оказалось, что стандартный интерфейс sysfs этого просто не умеет. Перед нами встала дилемма: отказаться от важнейшей фичи, которая избавляет от лишних деталей в схеме, или искать другой путь.
Путь №2: Компромисс с регистрами и новая проблема
Единственный способ управлять подтяжкой — писать напрямую в регистры процессора. Мы решили пойти на этот компромисс, но только для одной этой функции. Однако это немедленно породило новую проблему: для записи в регистры нужны права суперпользователя root. Просить пользователя запускать каждый свой скрипт через sudo — это нарушение нашего главного принципа удобства и безопасности.
Поиски решения: от сервиса к драйверу
Мы начали искать способ разрешить доступ к регистрам без sudo.
-
Идея №1: Системный сервис (демон). Мы написали фоновый сервис, работающий от
root, с которым библиотека могла бы общаться. На бумаге выглядело неплохо, но на практике оказалось медленно и ненадежно. Лишние задержки и еще одна потенциальная точка отказа — это не тот уровень качества, к которому мы стремились. -
Идея №2: Драйвер ядра. Это был самый сложный, но и самый правильный путь. Мы написали небольшой C-драйвер, который делает только одно: принимает от нашей библиотеки вычисленные значения и безопасно записывает их в нужный регистр. Он устанавливается в систему один раз и предоставляет доступ к нужной функции, не требуя прав
rootдля самого Python-скрипта.
В итоге мы получили лучшее из двух миров:
- 99% операций (включение/выключение, чтение, прерывания) работают через безопасный и стандартный
sysfs. - Одна специфическая операция (управление подтяжкой) работает через наш кастомный, но безопасный драйвер, который прячет всю сложность и небезопасность от конечного пользователя.
Эта архитектура не только решила нашу проблему, но и сделала библиотеку легко портируемой. Для поддержки новой платы достаточно описать ее регистры в отдельном файле конфигурации, а вся основная логика остается прежней.
Ключевые фишки #
-
Привычный API: Мы сохранили классические
setup,output,inputи системы нумерацииBOARD/BCM. Ваши скрипты с Raspberry Pi почти не придется менять. -
Никаких лишних резисторов: Одна из главных "болей" при работе с кнопками — необходимость ставить внешние подтягивающие или стягивающие резисторы. Мы реализовали управление внутренними резисторами процессора. Теперь схема подключения кнопки упрощается до предела:
# Включаем внутреннюю подтяжку пина к 3.3V GPIO.setup(15, GPIO.IN, pull_up_down=GPIO.PUD_UP)Как вы уже знаете, это реализовано через безопасный C-драйвер, который позволяет управлять этой функцией без
sudo. -
Прерывания без нагрузки на CPU: Мы не используем примитивный опрос в цикле (
while True: ...). Наша библиотека использует эффективный системный вызовepoll, который позволяет программе "уснуть" и мгновенно "проснуться" только тогда, когда на пине произойдет событие (например, нажатие кнопки). Это экономит ресурсы процессора и делает ваши проекты по-настоящему реактивными.
Практический кейс: собираем веб-управляемую лампочку за 5 минут #
Хватит теории, давайте сделаем что-нибудь полезное. Мы создадим простейший веб-сервер на Repka Pi, который позволит включать и выключать светодиод из браузера на вашем ПК или телефоне.
Что понадобится:
- Repka Pi с установленной
RepkaPi.GPIOи подключением к сети. - Светодиод, резистор (~220 Ом) и два провода.
- Установленный микро-фреймворк Flask (
pip3 install flask).
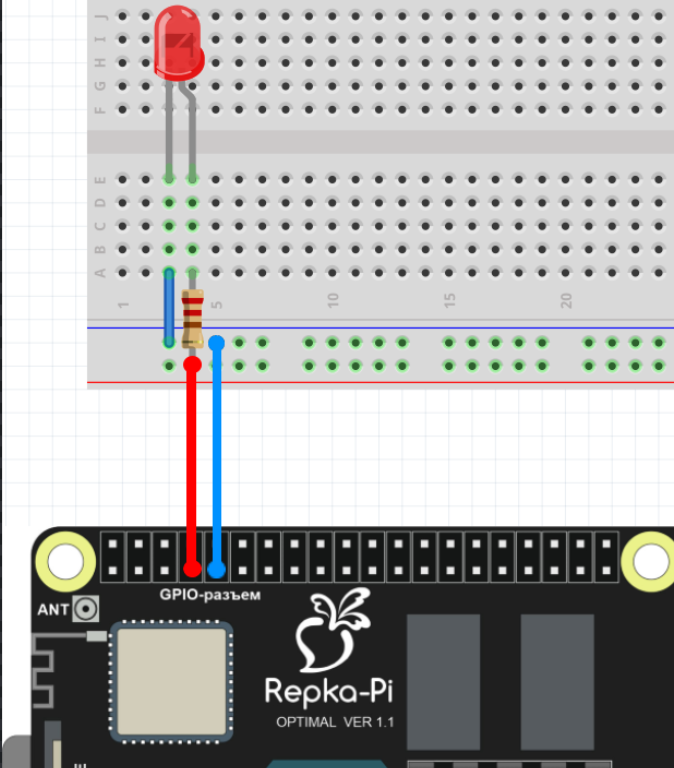
1. Схема подключения: Подключите длинную ножку светодиода (анод) через резистор к физическому пину 7, а короткую (катод) — к любому пину GND (например, пину 9).
2. Код (app.py): Создайте на Repka Pi файл app.py и вставьте в него этот код:
from flask import Flask, render_template_string
import RepkaPi.GPIO as GPIO
# --- Настройка GPIO ---
LED_PIN = 7
GPIO.setmode(GPIO.BOARD) # Используем нумерацию пинов на плате
GPIO.setup(LED_PIN, GPIO.OUT, initial=GPIO.LOW)
# --------------------
app = Flask(__name__)
# HTML-шаблон для нашей веб-страницы
HTML_TEMPLATE = """
<!DOCTYPE html>
<html>
<head>
<title>Repka Pi Web LED</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
</head>
<body>
<h1>Управление светодиодом</h1>
<p>Текущее состояние: <strong>{{led_state}}</strong></p>
<a href="/toggle"><button style="padding: 20px;">Переключить</button></a>
</body>
</html>
"""
@app.route('/')
def home():
# Читаем текущее состояние пина и отображаем страницу
state = "ВКЛЮЧЕН" if GPIO.input(LED_PIN) else "ВЫКЛЮЧЕН"
return render_template_string(HTML_TEMPLATE, led_state=state)
@app.route('/toggle')
def toggle():
# Переключаем состояние светодиода
GPIO.output(LED_PIN, not GPIO.input(LED_PIN))
return home()
if __name__ == '__main__':
try:
# Запускаем веб-сервер. host='0.0.0.0' делает его доступным
# для всех устройств в вашей локальной сети, а не только на самой Repka Pi.
app.run(host='0.0.0.0', port=5000)
finally:
print("\nЗавершение работы, очистка GPIO...")
GPIO.cleanup()
3. Запуск: Выполните команду в терминале Repka Pi:
python3 app.py
Теперь откройте браузер на любом устройстве в вашей Wi-Fi сети и перейдите по адресу http://<IP_АДРЕС_ВАШЕЙ_REPKA_PI>:5000. Вы увидите простую веб-страницу с кнопкой. Нажимайте на нее, и светодиод будет послушно включаться и выключаться!
Дальнейшие планы и призыв к контрибьюции #
RepkaPi.GPIO — это живой и развивающийся проект. Мы успешно реализовали базовый функционал для GPIO, прерываний, ШИМ и подтяжки.
Проект полностью открыт для сообщества. Если у вас есть идеи, вы нашли баг или хотите помочь в разработке — мы будем очень рады!
- [Ссылка на полную документацию и руководство по установке]
- [Ссылка на репозиторий проекта на GitFlic]
Спасибо за внимание! Надеемся, наша библиотека поможет вам в реализации ваших самых смелых DIY-проектов.